CBSE Class XI · NEET · JEE Advanced
ROTATIONAL MOTION
From the torque of a door hinge to the angular momentum of a spinning ice skater — master every concept visually, intuitively, and exam-ready.
11 Topics
Live Demos
Solved Numericals
FBD Techniques
NEET Tips
JEE Strategies
scroll

🚪
Real-Life Hook
Opening a Door
Push near the hinge → enormous effort. Push at the edge → effortless. That difference in rotational effect is torque — the universe’s « twisting force ».
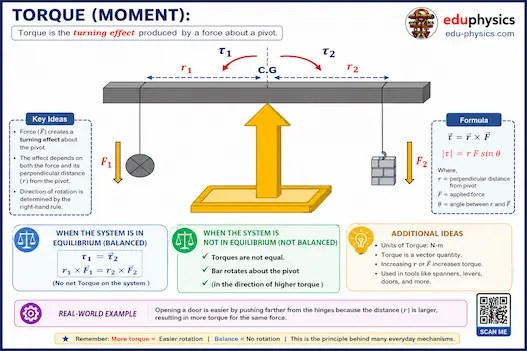
01Torque (Moment of Force)
τ = r · F · sin θ
τ = torque (N·m) | r = distance from pivot (m) | F = applied force (N) | θ = angle between r̂ and F̂

Angle θ45°
Arm length r130
τ = — N·m (F = 10 N)
Maximum torque when θ = 90° — force perfectly perpendicular to the moment arm
Zero torque when force passes through pivot (θ = 0° or 180°)
Direction: Anticlockwise = positive (+), Clockwise = negative (−) by convention
The effective arm is always r⊥ = r sinθ — the perpendicular distance
❌ Classic Error: Using the full r instead of r⊥ = r sinθ. The perpendicular distance is what creates rotation — not the direct distance.
✅ Memory Hook: Torque = « Twisting Force ». Longer arm + more perpendicular force = more twist. Think of a wrench.
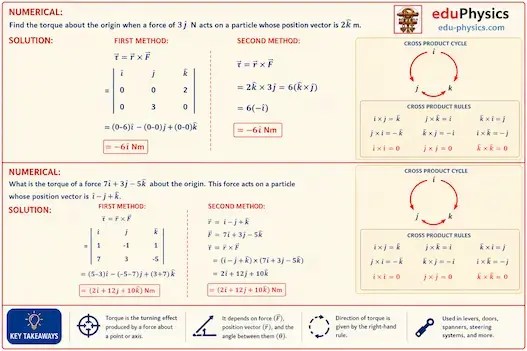
📐Solved Numerical
A force of 20 N acts at 60° to a rod of length 0.5 m, pivoted at one end. Calculate the torque about the pivot.
1Formula: τ = r × F × sin θ
2Substitute: τ = 0.5 × 20 × sin 60°
3Compute: τ = 10 × (√3/2) = 10 × 0.866
✔ τ = 8.66 N·m
🚗
Real-Life Hook
Steering Wheel
Push one side, pull the other. Two equal but opposite forces act — the car turns but doesn’t slide sideways. This is a couple: pure rotation, zero translation.
02Couple
M = F × d
M = moment of couple (N·m) | F = magnitude of each force | d = perpendicular distance between the two forces
Force F (N)20 N
Separation d140
Moment of Couple = — N·m
Net force = 0 → No translational motion. Only pure rotation!
Moment of couple is identical about any point — not just the midpoint. This is unique to couples.
Examples: Turning a tap, unscrewing a jar lid, a torque wrench on a bolt, a key in a lock
Exam TipIf a question says « only rotation, no linear acceleration » — the answer involves a couple! This is a direct identifier in NEET MCQs.
⚖️
Real-Life Hook
The See-Saw
A heavy child sits close to the pivot, a lighter child sits farther out — and they balance perfectly. The Principle of Moments governs this equilibrium.
03Principle of Moments
Σ τCW = Σ τACW
For rotational equilibrium: Sum of all clockwise torques = Sum of all anticlockwise torques about any pivot

Left mass (kg)10
Left dist (×0.1m)2.0m
Right mass (kg)5
Right dist (×0.1m)4.0m
—
Key Strategy: Always take moments about the pivot — this eliminates the unknown reaction force from the equation entirely!
Heavier object must sit closer to pivot to balance a lighter object sitting farther away
📐Solved Numerical
A 60 kg person sits 2 m left of a see-saw pivot. Where must a 40 kg child sit on the right to balance?
1Apply Principle: m₁d₁ = m₂d₂
2Substitute: 60 × 2 = 40 × d₂ → 120 = 40d₂
3Solve: d₂ = 120 ÷ 40
✔ d₂ = 3 m to the right of the pivot
🏗️
Real-Life Hook
Hanging Sign Board
Strings pull up, gravity pulls down, and there’s zero tendency to rotate. Both translational AND rotational equilibrium must be satisfied simultaneously.
04Equilibrium of a Rigid Body
Σ F = 0Translational equilibrium
No linear acceleration in any direction
Σ τ = 0Rotational equilibrium
No angular acceleration about any axis
★ THE GOLD SOLVING METHOD
| Step | Action | Why It Matters |
|---|---|---|
| 01 | Draw a clear Free Body Diagram (FBD) | Earns marks + prevents missing forces |
| 02 | Label all forces — weight, tension, normal, friction | Complete force inventory |
| 03 | Choose pivot at the unknown force location | Eliminates it from the moment equation |
| 04 | Apply Σ Fx = 0 and Σ Fy = 0 | Gives translational equations |
| 05 | Apply Σ τ = 0 about chosen pivot | Gives the rotational equation |
| 06 | Solve the simultaneous equations | Find all unknowns |
❌ Fatal Error: Only checking Σ F = 0. A body can still rotate even if the net force is zero! You MUST check both conditions.
✅ Exam Gold: Drawing the FBD fetches marks even if your final answer is wrong. Never skip it in CBSE boards!
🏍️
Real-Life Hook
Motorbike on a Bend
Riders lean into curves to keep their Centre of Gravity above the base. Stand on one leg — you shift weight instinctively. Stability is always about CG position!
05Centre of Gravity
x̄ = Σ mᵢxᵢ / Σ mᵢ
Weighted average position of all mass elements — the single point where the entire weight effectively acts

Tilt angle0°
Stable — CG is above the base
🟢 More Stable
Low CG + Wide base
Race cars, sumo wrestlers, pyramids
🔴 Less Stable
High CG + Narrow base
Tall vases, double-decker buses, herons
CG of uniform objects = geometric centre (midpoint for rod, centre for disc/sphere)
Composite bodies: split into parts, find each CG, then combine using weighted average formula
NEET TipIf the vertical line through CG falls outside the base area → the object topples. This stability test appears in almost every year’s NEET paper!
⛸️
Real-Life Hook
The Figure Skater
Hard to start spinning, hard to stop. That resistance to changing rotation is the Moment of Inertia — the « rotational mass » of a body.
06Moment of Inertia
I = Σ mᵢrᵢ²
Sum of (mass × square of distance from axis) for all particles. Unit: kg·m²
The further the mass from the axis, the harder to spin!
Mass at rim (%)50%
Relative I = —
Standard Formulae — Must Memorise
| Body | Axis | I |
|---|---|---|
| Thin rod (length L) | Centre, perpendicular | ML²/12 |
| Thin rod (length L) | One end, perpendicular | ML²/3 |
| Solid disc (radius R) | Central axis | MR²/2 |
| Ring (radius R) | Central axis | MR² |
| Solid sphere (R) | Diameter | 2MR²/5 |
| Hollow sphere (R) | Diameter | 2MR²/3 |
| Solid cylinder (R) | Own axis | MR²/2 |
I = Icm + Md²Parallel Axis Theorem — d is the distance between the two parallel axes. One axis must pass through CG.
Iz = Ix + IyPerp. Axis Theorem — Only for flat laminas. z-axis is perpendicular to the plane of lamina.
✅ Key Rule: Ring (MR²) > Disc (MR²/2) for same M and R. The ring has ALL its mass at the rim — highest possible I!
💿
Real-Life Hook
CD Spinning Up
Starts still, spins faster and faster. Angular velocity, angular acceleration, angular displacement — all just like linear motion. Just swap the symbols!
07Kinematics of Rotational Motion
⟶ Linear Motion
Displacementx (m)
Velocityv (m/s)
Accelerationa (m/s²)
Massm (kg)
v = u + at
s = ut + ½at²
v² = u² + 2as
⇌
↻ Rotational Motion
Angleθ (rad)
Ang. Velocityω (rad/s)
Ang. Accl.α (rad/s²)
Moment of InertiaI (kg·m²)
ω = ω₀ + αt
θ = ω₀t + ½αt²
ω² = ω₀² + 2αθ
Angular acc. α2 rad/s²
✅ Super Trick: The 3 kinematic equations for rotation are identical to linear ones — just replace x→θ, v→ω, u→ω₀, a→α. Zero extra memorisation!
📐Solved Numerical
A wheel starts from rest and reaches 20 rad/s in 4 seconds. Find (a) angular acceleration α, and (b) total angle θ rotated.
1(a) α: α = (ω − ω₀)/t = (20 − 0)/4 = 5 rad/s²
2(b) θ: θ = ω₀t + ½αt² = 0 + ½ × 5 × 16 = 40 rad
✔ α = 5 rad/s² | θ = 40 rad
🎡
Real-Life Hook
Ferris Wheel Starting Up
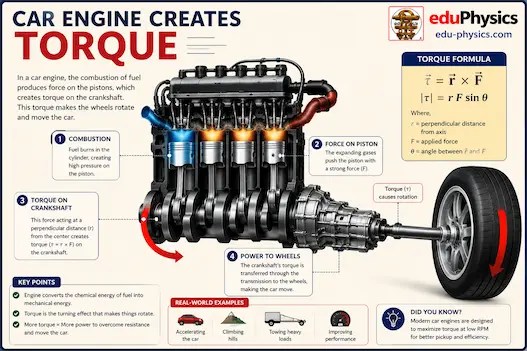
Push harder → more angular acceleration. Heavier wheel → more resistance. Torque equals inertia times angular acceleration. This is Newton’s 2nd Law for rotation!
08 Dynamics of Rotational Motion
τ = I × α
Direct rotational analogue of F = ma | Torque = Moment of Inertia × Angular Acceleration
Applied torque τ20 N·m
Moment of Inertia I5 kg·m²
α = τ / I = — rad/s²
PULLEY + HANGING MASS — NEET FAVOURITE
For mass m on a string over pulley (radius R, inertia I):
mg − T = ma → Newton’s 2nd for the mass
TR = Iα → Torque equation for the pulley
a = Rα → Constraint: string doesn’t slip
Combine all three: a = mg / (m + I/R²)
❌ Classic Error: Writing F = ma for a rotating body. Always identify first — is the body translating OR rotating? Then pick the correct equation.
🔩
Real-Life Hook
Tightening a Bolt
You apply torque, the bolt rotates through an angle. Work is done! The harder you push (τ) and the more it rotates (θ), the more energy transferred.
09Work Done by Torque
W = τ · θWork = Torque × Angular displacement
θ must be in radians!
P = τ · ω Power = Torque × Angular velocity
Compare with P = Fv (linear)
KErot = ½ I ω²
Rotational KE — compare with ½mv² | Rolling body: KEtotal = ½mv² + ½Iω²
Torque τ (N·m)20
Angle θ (rad)6
W = τ × θ = — J
✅ Graph Method (JEE): On a τ vs θ graph, the area under the curve = work done. Slope gives nothing directly. Area is everything!
📐Solved Numerical
A torque of 30 N·m rotates a flywheel through 10 rad. Find (a) work done and (b) power if this takes 5 seconds.
1(a) W: W = τ × θ = 30 × 10 = 300 J
2(b) P: P = W/t = 300/5 = 60 W
✔ W = 300 J | P = 60 W
🌍
Real-Life Hook
Earth’s Axial Spin
Earth has been spinning for 4.5 billion years. A gyroscope stays upright while spinning. Angular momentum resists any change in the state of rotation.
10Angular Momentum
L = I · ωFor a rotating rigid body
Unit: kg·m²/s
L = r × pFor a single particle
L = mvr sinθ
τ = dL / dt
Torque = Rate of change of angular momentum — the perfect rotational analogue of F = dp/dt in linear mechanics
Moment of Inertia I5
Angular velocity ω6
L = I × ω = — kg·m²/s
Unit: kg·m²/s — same dimensional formula as Planck’s constant ℏ (a popular MCQ fact!)
Direction: Along the rotation axis. Right-hand rule: curl fingers in rotation direction → thumb points to L vector
✅ Memory: L = « Spin Momentum ». Just like p = mv is linear momentum, L = Iω is rotational momentum. Same physics, different variables!
🧊
Real-Life Hook
Ice Skater Spinning
Arms spread out → spins slowly. Arms pulled in → spins dramatically faster! No external torque, so L stays constant. When I drops, ω skyrockets.
11Conservation of Angular Momentum
I₁ω₁ = I₂ω₂ = L
When no external torque acts on the system: angular momentum remains constant before and after any internal change

Arm spread80%
I (inertia)—
ω (spin speed)—
L (constant!)—
Arms spread: I increases → ω decreases. Spinning slows down.
Arms pulled in: I decreases → ω increases dramatically. Spinning speeds up!
Real examples: Diver tucking in somersault, Kepler’s 2nd law (planetary orbits), neutron star formation
📐Solved Numerical
A skater has I = 4 kg·m² and spins at ω = 5 rad/s. She pulls her arms in to reduce I to 2 kg·m². Find her new angular velocity.
1Conservation: I₁ω₁ = I₂ω₂ (no external torque)
2Substitute: 4 × 5 = 2 × ω₂ → 20 = 2ω₂
3Solve: ω₂ = 10 rad/s
✔ ω₂ = 10 rad/s — exactly doubled when I is halved!
MASTER REVISION TABLE
| Concept | Formula | Linear Analogy | Unit |
|---|---|---|---|
| Torque | τ = rF sinθ | F (force) | N·m |
| Moment of Inertia | I = Σmr² | m (mass) | kg·m² |
| Newton’s 2nd (rot) | τ = Iα | F = ma | N·m |
| Angular Momentum | L = Iω | p = mv | kg·m²/s |
| Torque–Momentum Link | τ = dL/dt | F = dp/dt | N·m |
| Conservation of L | I₁ω₁ = I₂ω₂ | m₁v₁ = m₂v₂ | — |
| Rotational KE | ½Iω² | ½mv² | J |
| Work by Torque | W = τθ | W = Fd | J |
| Power | P = τω | P = Fv | W |
| Kinematic Eq. 1 | ω = ω₀ + αt | v = u + at | rad/s |
| Kinematic Eq. 2 | θ = ω₀t + ½αt² | s = ut + ½at² | rad |
| Kinematic Eq. 3 | ω² = ω₀² + 2αθ | v² = u² + 2as | — |
Final StrategyAlways draw a FBD, write units clearly, and solve step-by-step. In CBSE boards, step marks for diagrams can rescue a calculation. In NEET/JEE, mastering the linear ↔ rotational analogy means you never memorise two sets of equations again — you only need one!
ROTATIONAL MOTION MASTERCLASS · CBSE CLASS XI · NEET · JEE · ALL RIGHTS RESERVED
Laisser un commentaire